Hochregallager Nr.2
Der zweite Versuch ein Hochregallager zu bauen. Ich habe mich diesmal bewusst gegen Vakuumgreifer entschieden, das ist
zwar extrem cool, aber auch sehr blöd zu bauen. Dieses Modell hat komplett funktionierend übrigens auf der fischertechnik
Convention 2010 gestanden. Das Modell wird momentan nur von einem RoboInterface gesteuert, es ist aber geplant das Modell
später zu vergrößern. Das Modell ist übrigens komplett in RoboBasic programmiert. Den Sourcecode, der auch eine voll funktionsfähige
Not-Aus Funktion enthält können Sie hier herunterladen: Download Source Code
Mit der Funktion set_output() lassen sich Ausgänge mit beliebiger Geschwindigkeit ansteuern. Die Funktion
prüft vor dem Einschalten eines Aktors, ob eine Not-Aus Situation vorliegt und wartet gegebenenfalls auf deren Beendigung.
Außerdem speichert die Funktion die Geschwindigkeit in einem Array. Der dauerhaft parallel zum Hauptprogramm laufende
Task prüft den Not-Aus Schalter, schaltet bei Tastendruck alle Ausgänge aus und schaltet sie bei nochmaligem Tastendruck mit der Geschwindigkeit
die jeweils im Array gespeichert wurde wieder ein. Einzig Steuerungen nach Zeit sind nicht implementiert, was aber sowieso
unsauber wäre.
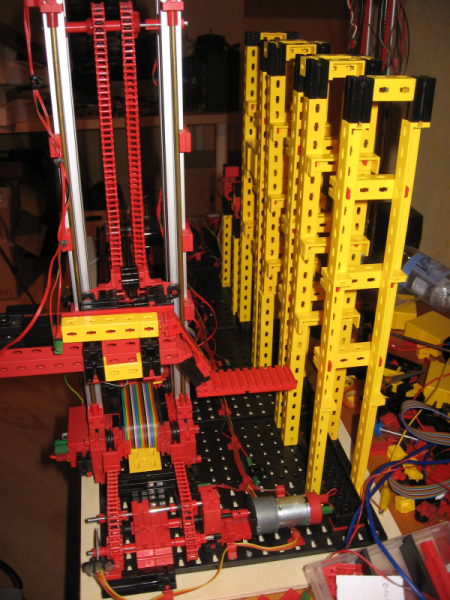
Die Mechanik des Einlageres wurde fast komplett mit Kettenantrieben umgesetzt, was schnelle, aber dennoch kräfitge Bewegungen wortwörtlich nach sich zieht ;-). Einzig die Z-Achse wird derzeit noch mit einem Hubgetriebe bewegt, was ich aber in Zukunft ändern möchte. Die Umdrehungsmessungen mache ich über Gabellichtschranken. Deren Verwendung habe ich bereits auf meiner Website beschrieben (fischertechnik→Tipps/OptischImpulseMessen). Die auf den Fotos weiter unten sichtbaren modifizierten 9V-Block Batteriekästchen besitzen eine Selbstgebastelte Schaltung mit dem 5V Regler, den ich ebenfalls auf meiner Website beschrieben habe (Elektronik→Schaltregler). Aufgrund der geringen Durchflussspannungen der Infrarot Dioden wäre die Abfallspannung an den Vorwiderständen so groß, dass diese sich gnadenlos überhitzen würden. Daher wird die Abfallspannung erniedrigt, indem ein Teil davon der 5V Regler übernimmt.
Fotos
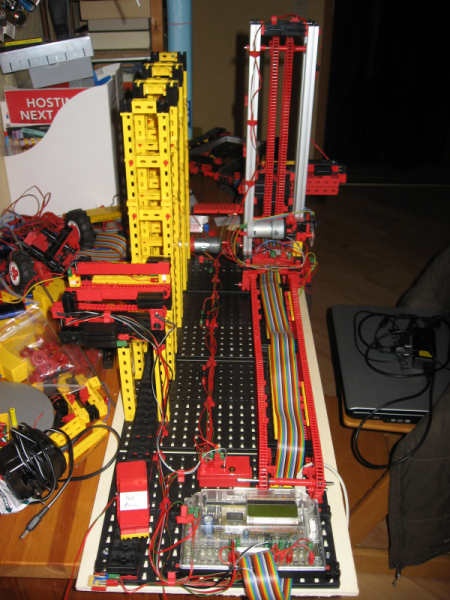
Gesamtansicht. Das Lager fasst 3x3 Kassettenkäschen, die über das Laufband zugeliefert und/oder abtransportiert werden. Das RoboInterface besitzt ein von mir nachgebautes internes Display wie es Thomas Kaiser entwickelt hat, das gibt Statusinformationen aus. Sehr nützlich auch zum „Debuggen“.
Das Laufband wird von 2 Lichtschranken gesteuert und hat vorn keine durchgehende Achse, damit der Einlagerer unter diese Box fahren und sie aufnehmen kann.
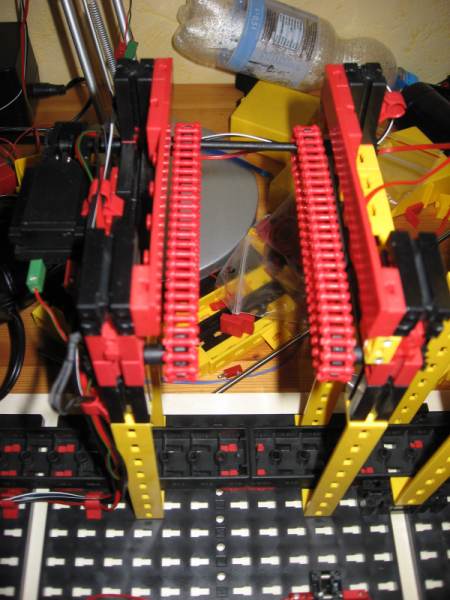
Hier ist besonders der Antrieb der Y-Achse ersichtlich. Der Kettenantrieb in Kombination mit der Achsenführung ermöglicht angenehm schnelle Bewegungen, ebenso wie bei der X-Achse.
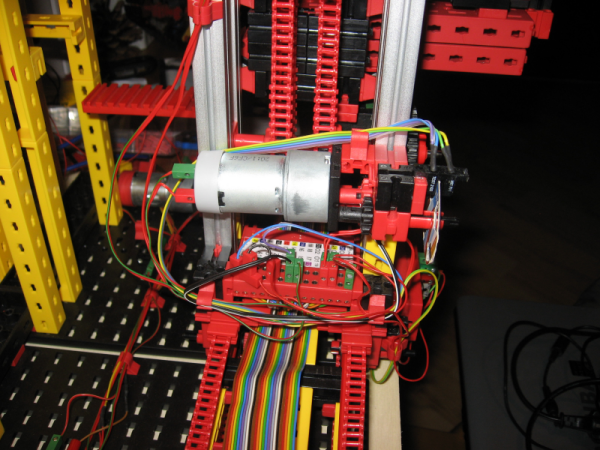
Die Motoren und Sensoren, die sich auf dem Einlagerer befinden sind durch die Buchsenplatte mit dem Interface verbunden. Das Flachbandkabel bewegt sich eigentlich ziemlich schön mit. Womit ich auch noch nicht ganz zufrieden bin ist die Genauigkeit. Momentan klappt das zwar alles grade so, aber höher auflösende Codierscheiben wären schön, werde ich irgendwann mal nachrüsten.
Video
Das Video zeigt einen Testlauf vor der Convention 2010.